MATLAB в инженерных и научных расчетах
Решение задачи кинематика точки
Ответ: при t1= 0 с : V = 0 м / с; a = 2 м / с2; аt= 2 м / с2; аn= 0 м / с2; r = 0,25 м.
Решение задачи кинематика точки в общем виде можно получить путём применения символьных вычислений системы MATLAB. При движении точки на плоскости (x,y) её кинематические характеристики определяются следующей m-функцией:
function[Vx,Vy,V,ax,ay,a,at,an,ro]=kinema(x,y);
%кинематика точки
%входные параметры - х(t), y(t)- уравнения движения точки
Vx=diff(x,'t');
Vy=diff(y,'t');
V=sqrt(Vx^2+Vy^2);
ax=diff(Vx,'t');
ay=diff(Vy,'t');
a=sqrt(ax^2+ay^2);
at=(Vx*ax+Vy*ay)/V;
an=sqrt(a^2-at^2);
ro=V^2/an;
В качестве примера рассмотрим уравнения движения x = 4 t , y = 16 t2 – 1. Необходимо найти кинематические характеристики в любой момент времени, а также в момент времени t1 = 0,5 c ( x, y – м; t – c ).
Задача решается с помощью следующего m – сценария:
>> syms x y t Vx Vy V ax ay a at an ro
>> x=4*t;y=16*t^2-1;
>> [Vx,Vy,V,ax,ay,a,at,an,ro]=cinema2d(x,y)
Vx =
4
Vy =
32*t
V =
4*(1+64*t^2)^(1/2)
ax =
0
ay =
32
a =
32
at =
256*t/(1+64*t^2)^(1/2)
an =
32*(1-64*t^2/(1+64*t^2))^(1/2)
ro =
1/32*(16+1024*t^2)/(1-64*t^2/(1+64*t^2))^(1/2)
Вид траектории определяется командой - ezplot(x2-1,-2,2)
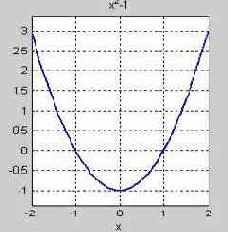
Рис. 4.10. Траектория движения точки
В момент времени t1 = 0,5 c кинематические характеристики определяются командой подстановки - subs
>> K=[Vx,Vy,V,ax,ay,a,at,an,ro];
>> t=0.5;
>> subs(K)
ans =
Columns 1 through 6
4.0000 16.0000 16.4924 0 32.0000 32.0000
Columns 7 through 9
31.0446 7.7611 35.0464
Аналогичным образом решается задача кинематики точки при её движении в пространстве: в этом случае m – функция задаётся в виде
function[Vx,Vy,Vz,V,ax,ay,az,a,at,an,ro]=cinema3d(x,y,z);
%кинематика точки
%входные параметры - х(t), y(t), z(t) - уравнения движения точки
Vx=diff(x,'t');
Vy=diff(y,'t');
Vz=diff(z,'t');
V=sqrt(Vx^2+Vy^2+Vz^2);
ax=diff(Vx,'t');
ay=diff(Vy,'t');
az=diff(Vz,'t');
a=sqrt(ax^2+ay^2);
at=(Vx*ax+Vy*ay+Vz*az)/V;
an=sqrt(a^2-at^2);
ro=V^2/an;
Рассмотрим пример
>> syms x y z t
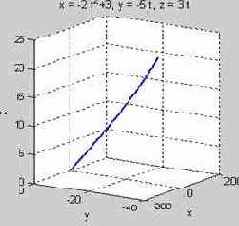
>> x=-2*t^2+3;y=-5*t;z=3*t;
>> [Vx,Vy,Vz,V,ax,ay,az,a,at,an,ro]=cinema3d(x,y,z)
Vx =
-4*t
Vy =
-5
Vz =
3
V =
(16*t^2+34)^(1/2)
ax =
-4
ay =
0
az =
0
a =
4
at =
16*t/(16*t^2+34)^(1/2)
an =
4*(1-16*t^2/(16*t^2+34))^(1/2)
ro =
1/4*(16*t^2+34)/(1-16*t^2/(16*t^2+34))^(1/2)
Траектории движения – ezplot3(x,y,z,[0,8])
В момент времени t1
= 0,5 c
>> K=[Vx,Vy,Vz,V,ax,ay,az,a,at,an,ro];
>> t=0.5;
>> subs(K)
ans =
Columns 1 through 6
-2.0000 -5.0000 3.0000 6.1644 -4.0000 0
Columns 7 through 11
0 4.0000 1.2978 3.7836 10.0433
Таблица 4.2
|
Номер варианта |
Уравнения движения |
t1, c |
|
|
x = x ( t ), см |
y = y ( t ), см |
||
|
1 |
- t 2 + 3 |
- 5 t |
1/2 |
|
2 |
4 cos2(? t / 3) + 2 |
4 sin2(? t / 3) - 1 |
1 |
|
3 |
- cos(? t2 / 3) + 3 |
sin(? t2 / 3) - 1 |
1 |
|
4 |
4 t + 4 |
- 4 / (t + 1) |
2 |
|
5 |
2 sin(? t / 3) – 1 |
- 3 cos(? t / 3) + 4 |
1 |
|
6 |
3 t2 + 2 |
- 4 t |
1/2 |
|
7 |
7 sin(? t2 / 6) + 3 |
2 - 7 cos(? t2 / 6) |
1 |
|
8 |
- 3 / (t + 2) |
3 t + 6 |
2 |
|
9 |
3 t2 – t + 1 |
5 t2 – 5 t / 3 - 2 |
1 |
|
10 |
- 4 cos(? t / 3) |
- 2 sin(? t / 3) – 3 |
1 |
|
11 |
- 4 t2 + 1 |
- 3 t |
1/2 |
|
12 |
5 sin2(? t / 6) |
- 5 cos2(? t / 6) – 3 |
1 |
|
13 |
5 cos(? t2 / 3) |
- 5 sin(? t2 / 3) |
1 |
|
14 |
- 2 t – 2 |
- 2 / (t + 1) |
2 |
|
15 |
4 cos(? t / 3) |
- 3 sin(? t / 3) |
1 |
|
16 |
3 t |
4 t2 + 1 |
1/2 |
|
17 |
7 sin2(? t / 6) – 5 |
- 7 cos2(? t / 6) |
1 |
|
18 |
1 + 3 cos(? t2 / 3) |
3 sin(? t2 / 3) + 3 |
1 |
|
19 |
- 5 t2 – 4 |
3 t |
1 |
|
20 |
2 – 3 t – 6 t2 |
3 – 3 t / 2 – 3 t2 |
0 |
|
21 |
6 sin(? t2 / 6) – 2 |
6 cos(? t2 / 6) + 3 |
1 |
|
22 |
7 t2 – 3 |
5 t |
1/4 |
|
23 |
3 – 3 t2 + t |
4 – 5 t2 + 5 t / 3 |
1 |
|
24 |
- 4 cos(? t / 3) – 1 |
- 4 sin(? t / 3) |
1 |
|
25 |
- 6 t |
- 2 t2 – 4 |
1 |
|
26 |
8 cos2(? t / 6) + 2 |
- 8 sin2(? t / 6) - 7 |
1 |
|
27 |
- 3 – 9 sin(? t2 / 6) |
- 9 cos(? t2 / 6) + 5 |
1 |
|
28 |
- 4 t2 + 1 |
- 3 t |
1 |
|
29 |
5 t2 + 5 t / 3 – 3 |
3 t2 + t + 3 |
1 |
|
30 |
2 cos(? t2 / 3) – 2 |
- 2 sin(? t2 / 3) + 3 |
1 |
